This tool projects any image from or into a defined area, transforming it as necessary. The source image may either be the current layer or the
image set as the current texture. Some options under this tool correct for perspective, and may therefore be used to correct for, adjust or artifically add perspective effects.
Some options of this tool require a texture to be loaded, which can be any image, preferably one that is larger than the
destination area. This may be an existing image, or a composite formed by tiling. To load a texture, use the
Texture menu under the
Objects menu.
Some options of this tool use display options to control what is displayed when you are setting the points.
Options
Transform
This option transforms the
image in the current layer to fit into any four sided polygon region as
specified by the user by
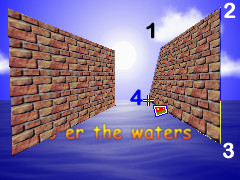
clicking four points on the image. Perspective is adjusted accordingly. Please note that the points must be set in
a circular manner, either clockwise or anti-clockwise. The first two points map
to the top edge of the source image, while the last two map to the bottom. In
the example below, the points were set in the order indicated by the numbers.
Remember that you can always modify the points after setting them, and that you
must right-click the image (or press Enter) to apply.
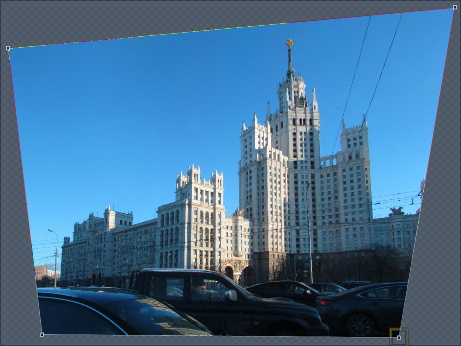
Reverse Transform
This option transforms any four sided polygon region into a rectangular image as
specified by the user by
clicking four points on the image. Perspective is adjusted accordingly. The user specifies any four sided polygon region by the user by
clicking four points on the surface; the tool then uses that area as the source image and transforms it as required to fill the whole layer, applying perspective correction as needed. Please note that the points must be set in
a circular manner, either clockwise or anti-clockwise. The first two points map
to the top edge of the source image, while the last two map to the bottom. In
the example below, the points were set in the order indicated by the numbers.
Remember that you can always modify the points after setting them, and that you
must right-click the image (or press Enter) to apply.
Texture Polygon
This option transforms the
image set as the current texture to fit into any four sided polygon region as
specified by the user. Once the texture is set, it can be applied to the surface by
clicking four points on the surface. Please note that the points must be set in
a circular manner, either clockwise or anti-clockwise. The first two points map
to the top edge of the source image, while the last two map to the bottom. In
the example below, the points were set in the order indicated by the numbers.
Remember that you can always modify the points after setting them, and that you
must right-click the image (or press Enter) to apply.
The mapping is done with perspective enabled. This gives the
illusion of depth when this tool is used to compose objects, as in the two walls
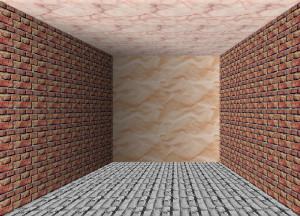
above. You can extend this functionality to draw complete objects, such as the
hallway below:
Texture Disk
This option transforms the
image set as the current texture to fit into a circle or ellipse; in other words, it turn the texture into a disk/ring. Once the texture is set, it can be applied to the surface by
selecting a rectangular region on the surface. The circle or ellipse containing the texture will be drawn into this region (see example below)
Remember that you can always modify the points after setting them, and that you
must right-click the image (or press Enter) to apply.
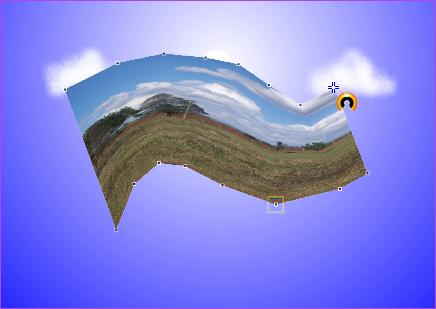
Texture Strip
This option transforms maps any
image set as the current texture into any shape of the user’s choosing. The said shape is created using several vertices in a triangle strip manner. Once the texture is set, it can be applied to the surface by
clicking multiple points on the surface. These must be an even number greater or equal to four, and should follow a pattern like the one shown below:
The grey line shows the destination area. Remember that you can always modify the points after setting them, and that you
must right-click the image (or press Enter) to apply. The mapping is done with perspective disabled (affline mapping) since the tool gives the user the ability to control this via the location of the points. The final image looks something like this:
You can use this effect to wrap images around objects quite easily.


 Transform
Transform
 Reverse Transform
Reverse Transform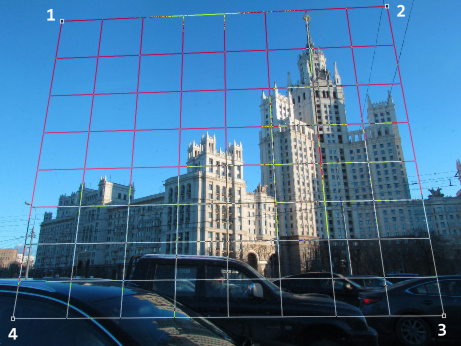

 Texture Polygon
Texture Polygon
 Texture Disk
Texture Disk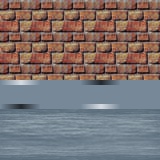

 Texture Strip
Texture Strip